Hori group's research focuses on systems and control theory with applications in synthetic biology, molecular robotics, and machine learning.
Control Engineering × Biomolecular Systems
Advances in synthetic biology and DNA nanotechnology have enabled the bottom-up engineering of biomolecular systems that exhibit cell-like behaviors and extend beyond mere imitation of cellular processes to realize artificial systems with novel functionalities.
These artificial biomolecular systems are expected to contribute to realizing new information-processing devices, molecular machines, and molecular robots that operate on chemical principles.
Toward such applications, it is becoming increasingly important not only to "understand and predict" biochemical processes at the microbial and molecular levels, but also to "design and control" such systems.
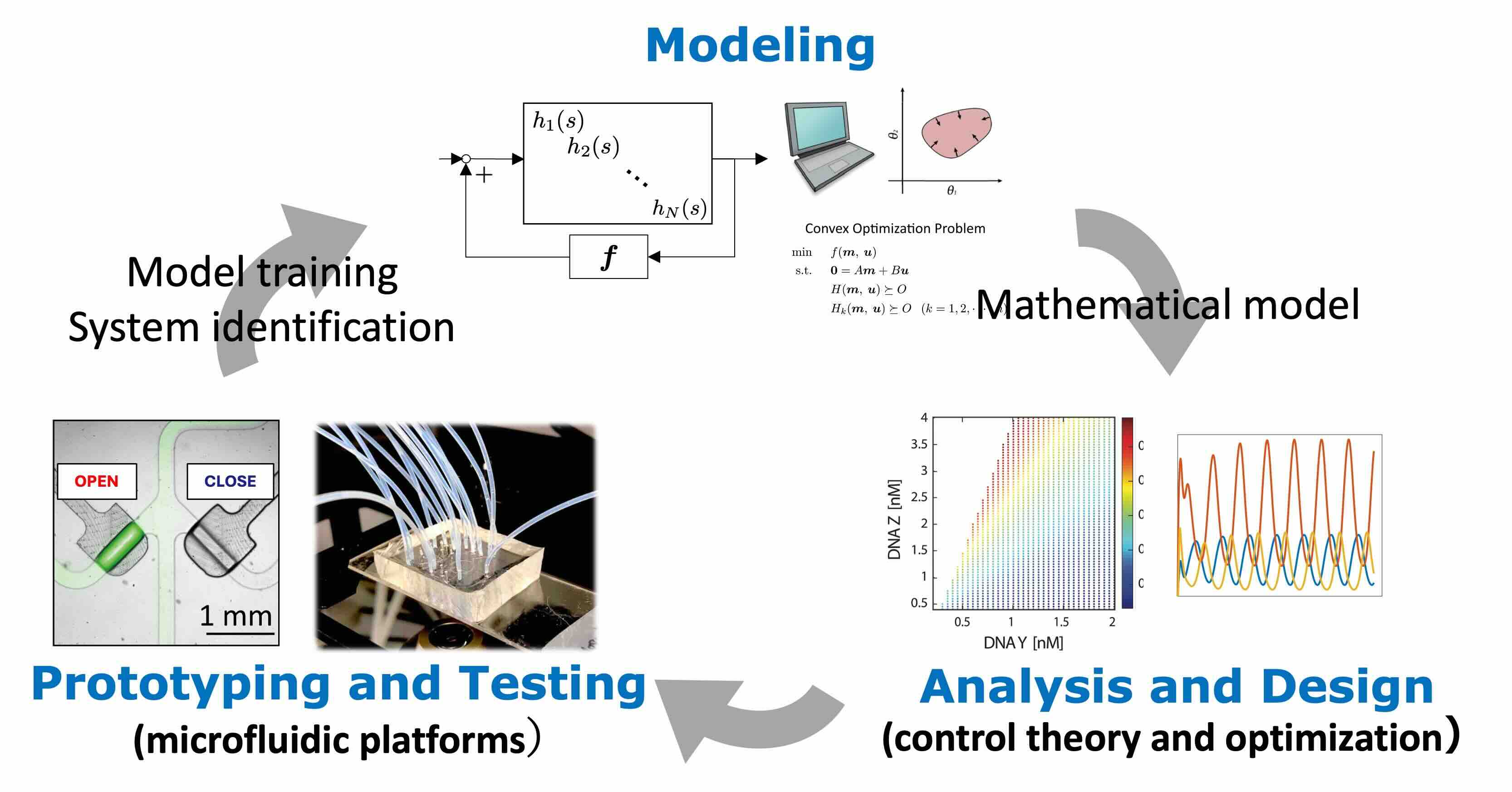
The overarching goal of our research is to establish Biomolecular Systems Engineering as a discipline that provides a systematic foundation for designing and controlling biomolecular systems built from microorganisms and DNA (see figure). Our work addresses a fundamental question: What theoretical frameworks and experimental platforms are needed to systematically design and control systems driven by chemical reactions -- just as we do with electrical or mechanical systems? While synthetic biology and molecular robotics traditionally aim to realize functions through the design of molecular networks, we advance these fields by incorporating computer-based feedback control of reaction kinetics to explicitly address the dynamics of molecular systems. This approach facilitates the rational design and optimization of dynamic molecular circuits through rigorously grounded theoretical frameworks.
Systems and Control Theory for Biomolecular Systems
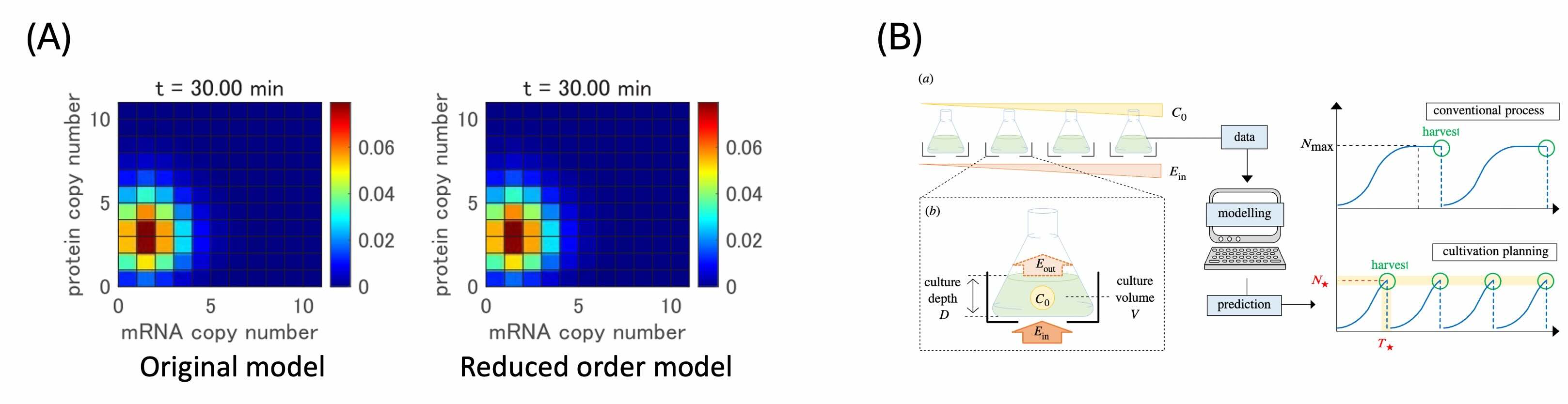
Our theoretical work is grounded in control theory and mathematical optimization to model, analyze, and design the dynamics of biomolecular systems. Our research spans multiple scales from molecular reactions to cellular and population-level dynamics and covers topics such as analysis and control of stochastic cellular responses (Fig. A; [IEEE L-CSS 2025], [ASCC 2024], [Automatica 2022], [R. Soc. Interface 2018]), molecular communication networks ([IEEE T. Nanobiosci. 2024], [IEEE T. MBMC 2023], [IEEE T. MBMC 2022]), and biocircuit analysis and synthesis ([Automatica 2022], [Automatica 2013]). We also translate these theoretical insights into practice through collaborations with industrial partners, including the optimization of algae-based bioproduction. (Fig. B; [R. Soc. Interface 2022]). Our recent works also explore integrating model-based and data-driven design approaches to create robust and interpretable frameworks for biomolecular systems.
Design Testbeds for Biomolecular Systems
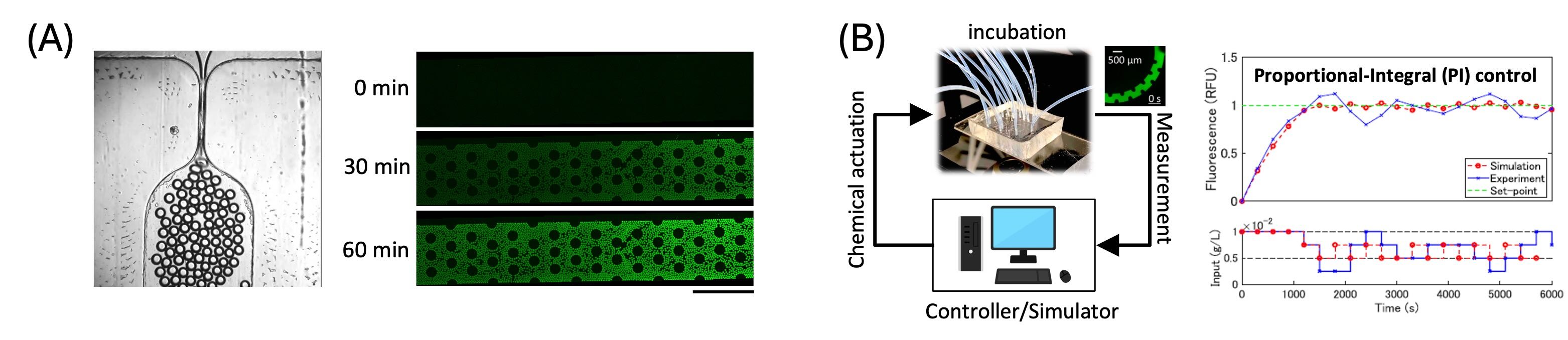
Our experimental research focuses on developing automated experimental platforms specifically designed to enable system-theoretic design and optimization of biomolecular systems ([bioRxiv 2025], [RSoc Open Sci 2023], [SICE 2022], [Lab on a Chip 2017], [Mol Syst Biol 2016], [eLife 2015]).
By developing automation technologies centered around microfluidic devices and connecting artificially designed biomolecular systems to computers in closed-loop configurations, we are establishing feedback-driven molecular experimental platforms that tightly integrate theory and experiment.
Through this iterative interplay between theoretical design and experimental implementation, we aim to establish a new foundation for theory-driven and high-throughput biomolecular system design.
Control Theory × Machine Learning
Recent advances in computational power and machine learning have rapidly expanded the capabilities of data-driven analysis and control for dynamic systems. Building on these technological developments, a new control paradigm is attracting increasing attention, integrating traditional model-based control theory with data-driven learning to achieve adaptability in complex and changing environments.
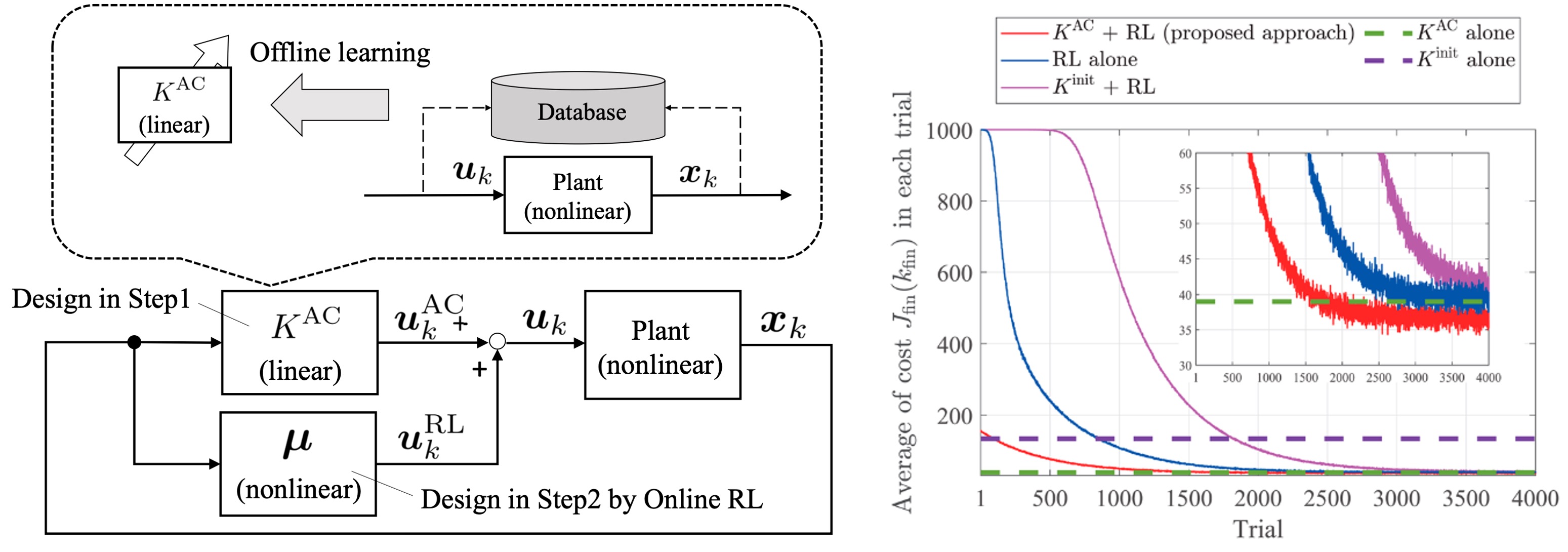
Our research aims to establish a new framework of control theory that combines the mathematical rigor and interpretability of model-based methods with the flexibility and adaptability of machine learning. By incorporating domain knowledge and physical models into learning algorithms, we seek to develop theoretical foundations that ensure safe and efficient learning as well as robust closed-loop performance. Recent efforts include the development of efficient optimal control design methods that combine control theory with reinforcement learning ([JCMSI 2023]) and long-term safety analysis of control systems ([IEEE L-CSS2024]).